

I have the ultimate goal to make a plane which flies and collects… something. Can’t leak my plans now, can I? I want the plane to be capable of flying autonomously so that I don’t have to manually control it for the duration of the “collection“. Heck, if we’re going autonomous then I also want to be able to give it coordinates to fly to certain waypoints to collect more of that “something” based off of certain locations.
I know I’m being very cryptic right now but all you need to know is that my goal at the moment is to achieve and perfect autonomous flight, after which I’ll have to make a plane designed for the “collection” mission.
The answer to my goal is quite simple and not so simple at the same time. It’s Ardupilot, an open-source autopilot software designed for RC vehicles such as planes, quadcopters, boats and even rovers. While other softwares like iNAV exist and are easier to setup, they are not as versatile as Ardupilot. That’s the simple part. The difficulty came in the fact that I had absolutely zero experience with such stuff.
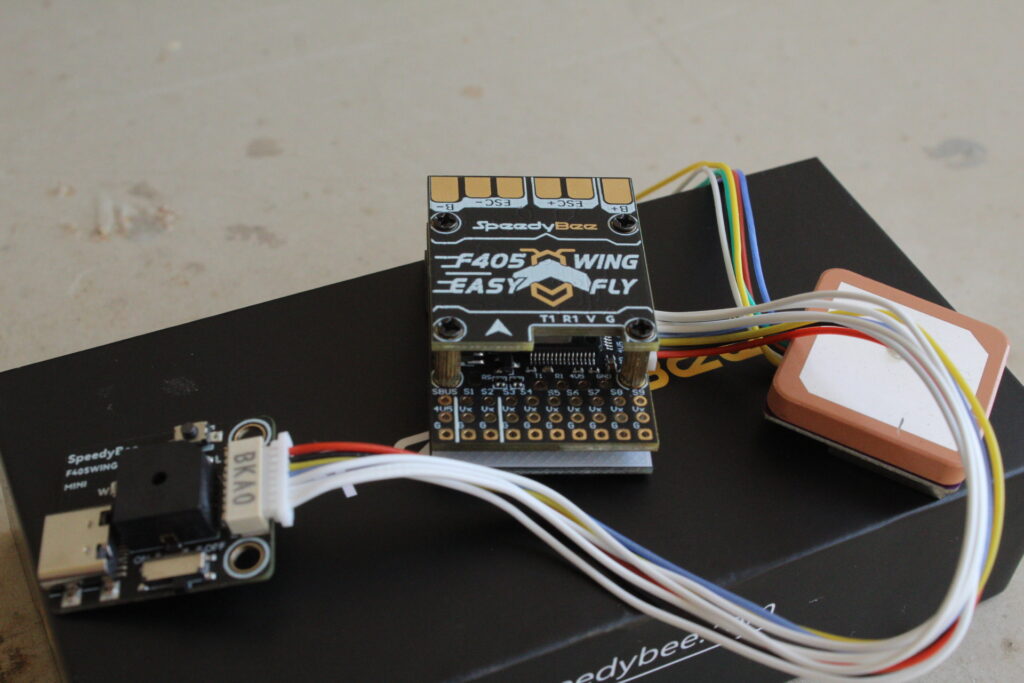
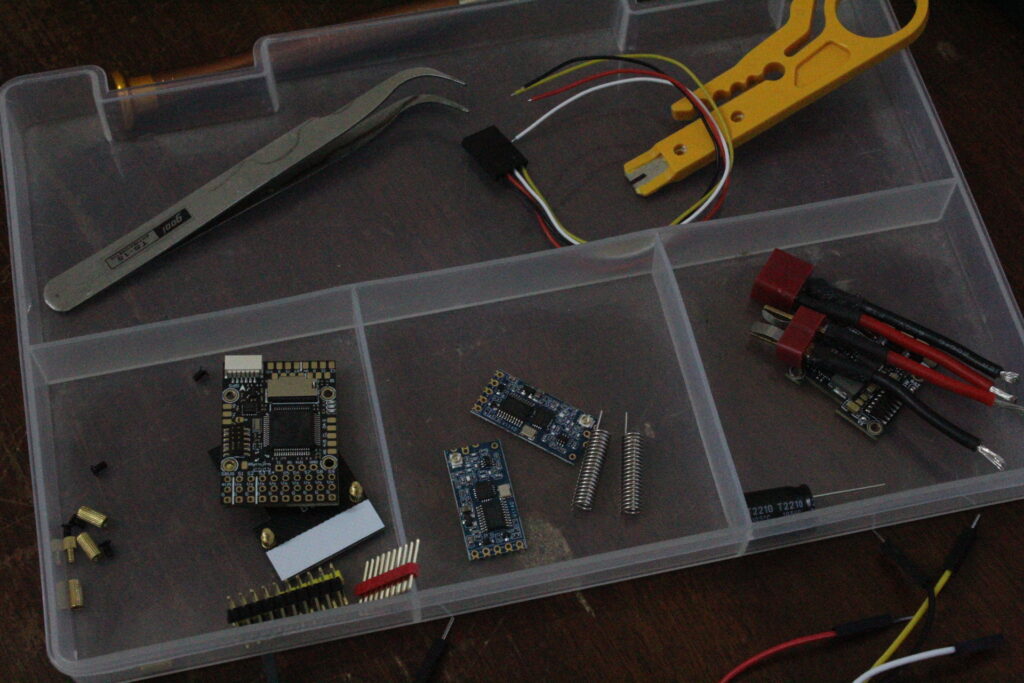
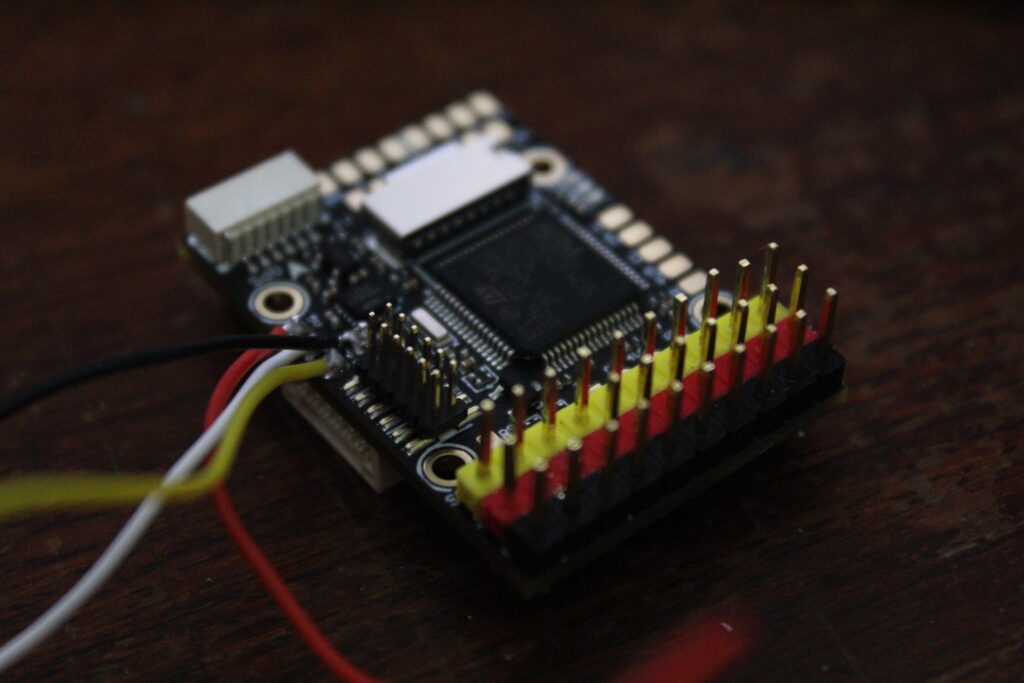
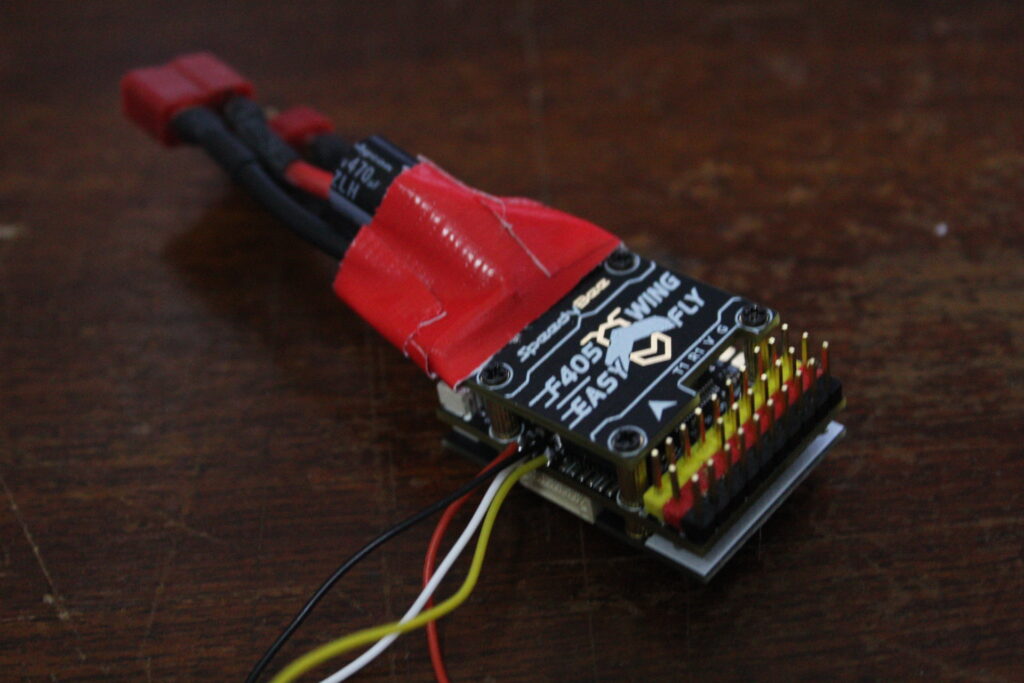
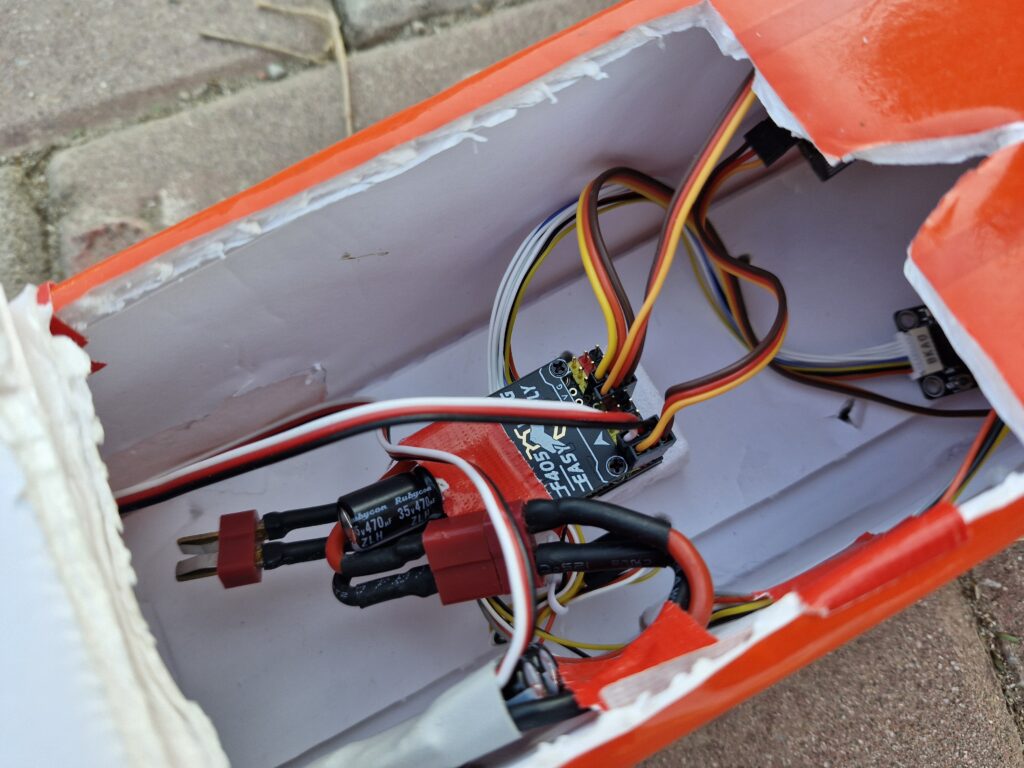
I ended up ordering a few parts from Aliexpress, mainly the Speedybee F405 Wing Mini. I chose it because.. well.. it was cheap. Plus it was mostly plug-and-play from a wiring perspective (it came with the connectors in the box) and it could run Ardupilot! I soldered the servo connectors on, flashed it with the firmware, connected a GPS + compass module to it. And we’re off!
Not so fast. I spent the next day gobbling up the Ardupilot documentation in my free time and ensuring I wasn’t going to miss anything. I had to calibrate the accelerometers, compass, setup the servo connections, RC receiver, and a lot more. I make it sound like it was boring stuff but it honestly was quite enjoyable as I learned along the way.
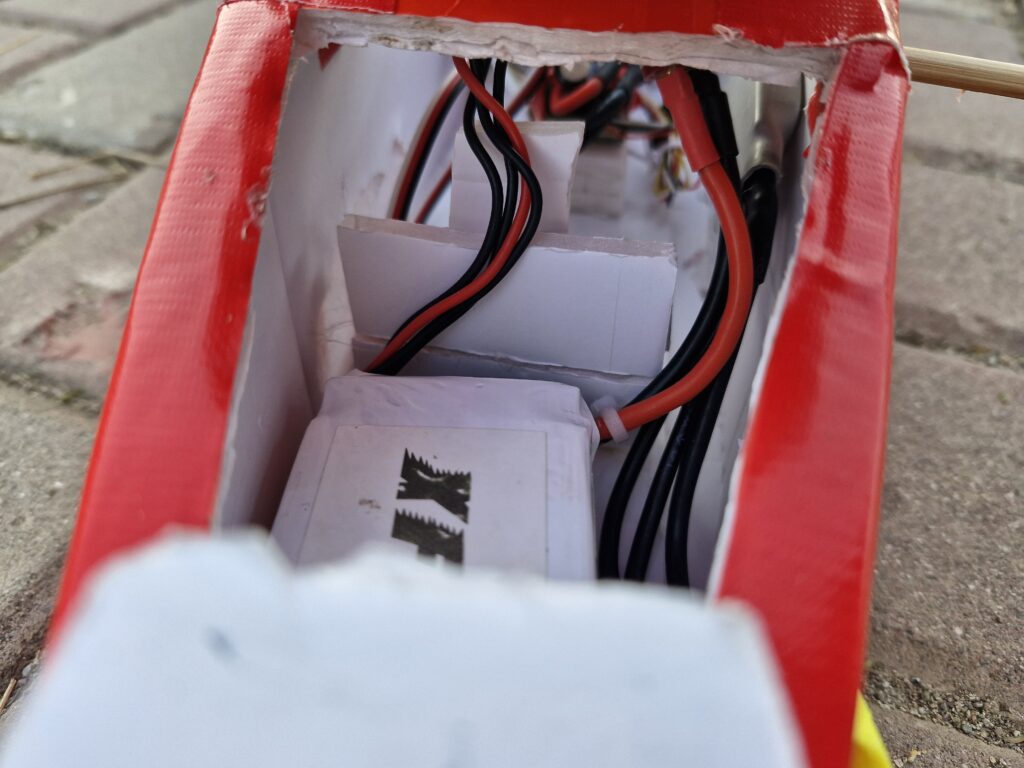
The next day, I brought in a RC plane which I had previously made to experiment landing gears with and straight up ripped them off >:D The fuselage of the plane was quite large (infact too large as it made the plane look short and stubby) however it gave me ample space to place components and mess around inside. After mounting the flight controller inside and setting it up, it was ready to go!






It was now time for the maiden flight. When setting Arduplane up, you’re required to tune the flight controller to “teach it how to fly”. While this can be done manually, I decided to go with the easy way of using the AutoTune mode in Ardupilot which conveniently does it all for you as you manually fly the plane.
I had QGroundControl running on a laptop to check the status of the plane, change the flight modes and generally test out the ground control software. With the flight surfaces check complete and the flight mode in autotune, it was ready to be launched!
I stood next to the camera recording the launch as my dad threw the plane. The first few seconds were a little sketchy as the controls were twitchy and I kept overcorrecting, however once I got the hang of it, it flew smoothly through the air! I could visually see the jerkiness of the plane disappear as the flight controller tuned itself automatically.
After flying for a few minutes, I decided it was time to land. Since I didn’t have spoilers or flaps to slow the plane down, I circled the landing zone a few times to judge how far the plane would glide once I brought the throttle down to zero. The plan was to either bring it in between the light poles to land on the road or on the grass to its left. Since there were people ahead on the road, I went for the second option.
And that sums up the first time I setup a flight controller and Ardupilot with the intention of making an autonomous plane! The autotune and stabilized flight modes worked great, but the RTH (Return-To-Home) mode (where the plane autonomously flies to where it took off from) was not given a chance to work properly. While it did seem to work correctly with the plane autonomously turning and flying, it ended up trying to fly over some houses since I had not set the RTH point correctly. Fearing a safety risk, I took over manual control and flew it back.
Fully autonomous flying was achieved in the next flights I conducted, which will be detailed in my next post. Thanks for reading!